人智导(六):“不可测”问题的求解
本文共 4373 字,大约阅读时间需要 14 分钟。
人智导(六):“不可测”问题的求解
动作效果的不确定性
如图所示:
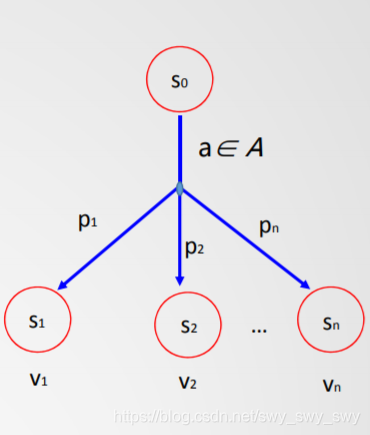
- 智能体不能确切地直到其动作的效果,可能有多个结果状态
- 表示为: [ s 1 , … , s n ] = r e s u l t ( s 0 , a ) [s_1,\dots ,s_n]=result(s_0,a) [s1,…,sn]=result(s0,a)
- 动作效果不确定,需要与环境交互
- 在执行动作之前,智能体需要计算所用结果状态的概率 P ( s i ∣ a ) P(s_i|a) P(si∣a)
- 动作的期望效用(Expected Utility): E U ( a ) = Σ i P ( s i ∣ a ) V ( s i ) EU(a)=\Sigma_iP(s_i|a)V(s_i) EU(a)=ΣiP(si∣a)V(si)
- 状态价值函数 V ( s ) V(s) V(s):状态到实数值的映射
- 智能体应当选择当前状态下具有最大期望效用(MEU)的动作
最优策略
- 动作后续状态确定(deterministic)的搜索问题
- 发现最优(optimal)plan,从初始状态到目标状态的一个动作序列
- 动作后续状态不确定(nondeterministic)
- 发现一个最优(optimal)policy π ∗ : s → a \pi ^* :s\to a π∗:s→a
- policy策略为一个状态确定应采取的动作(what to do)
- 最优的policy是满足MEU的
不确定条件下的搜索问题
如图:
- “不可测”问题
- 目标导向(goal-seeking)
- 与环境交互,只有动作执行后才能确定后续状态
- 趋向目标的累计回报(reward),而非动作直接的回报值
- 求解方法
- 发现最优policy策略 π ∗ : s → a \pi ^*: s\to a π∗:s→a
- 即在任何一个状态 s s s,确定趋向目标的最佳动作 a a a
- 定义Q-state状态表示(计算)EU
与环境交互模型
如图:
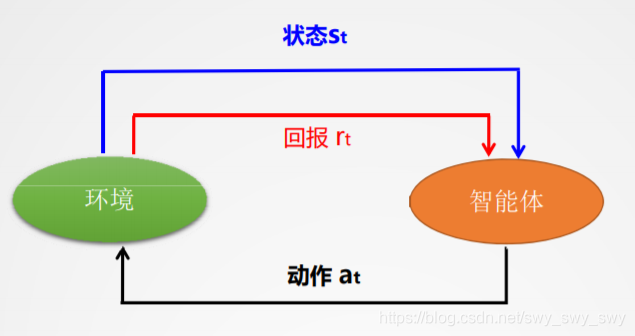 定义三个本体元素: 状态(state)、动作(action)、回报(reward) 智能体所面对的问题: 与环境交互中确定动作的后续状态,达到目标
定义三个本体元素: 状态(state)、动作(action)、回报(reward) 智能体所面对的问题: 与环境交互中确定动作的后续状态,达到目标 马尔可夫决策过程
马尔可夫决策过程(Markov Decision Process):
- 一个状态(state)集合: S S S
- 一个动作(actions)集合: A A A
- 一个后继函数 T ( s , a , s ′ ) T(s,a,s') T(s,a,s′),且从状态 s s s到 s ′ s' s′的概率为 P ( s ′ ∣ s , a ) P(s'|s,a) P(s′∣s,a)
- 一个回报(reward)函数: R ( s , a , s ′ ) R(s,a,s') R(s,a,s′)
- 初始状态 s 0 s_0 s0
- 一个或多个目标(结束)状态
马尔可夫过程
基本性质
无记忆性(memoryless)
动作和后继状态仅取决于当前所在状态,与之前的状态无关 P ( S t + 1 = s ′ ∣ S t = s t , A t = a t , S t − 1 = s t − 1 , A t − 1 , … , S 0 = s 0 ) = P ( S t + 1 = s ′ ∣ S t = s t , A t = a t ) P(S_{t+1}=s'|S_t=s_t, A_t=a_t,S_{t-1}=s_{t-1},A_{t-1},\dots ,S_0=s_0)=P(S_{t+1}=s'|S_t=s_t,A_t=a_t) P(St+1=s′∣St=st,At=at,St−1=st−1,At−1,…,S0=s0)=P(St+1=s′∣St=st,At=at) 正如标准搜索模型,后续函数仅依赖于当前状态Markov搜索树
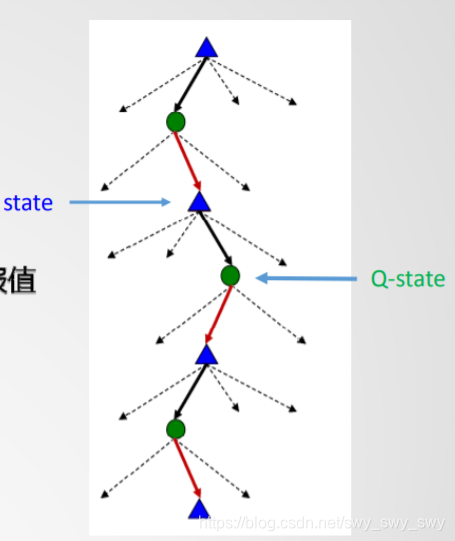
如图:
 MDP:求解动作效果不确定问题
MDP:求解动作效果不确定问题 - 对任意状态 s s s下的动作选择: p o l i c y π ∗ ( s ) : s → a policy~\pi^*(s):s\to a policy π∗(s):s→a
- 任意状态 s s s选这样的动作,使得价值函数 V ( s ) V(s) V(s)计算累计回报(sum of rewards)期望最大化
如何选择最优动作
- 对任意一个状态 s s s,都通过价值函数对应一个值
- V ( s ) = V(s)= V(s)=累计回报最大期望值{目标状态 V V V值为0}
- 最优策略: π ∗ = a r g π m a x V π ( s ) , ( ∀ s ) \pi ^* =arg_{\pi}~max~V^{\pi}(s),(\forall s) π∗=argπ max Vπ(s),(∀s)
示例:
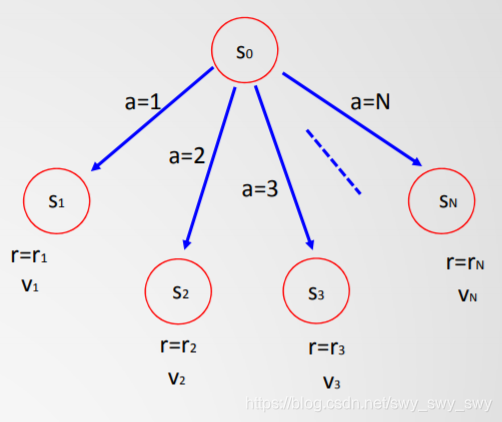 如上图 V 0 = m a x a ∈ 1 , … , N ( r a + γ V a ) V_0=max_{a\in 1, \dots ,N}(r_a+\gamma V_a) V0=maxa∈1,…,N(ra+γVa)
如上图 V 0 = m a x a ∈ 1 , … , N ( r a + γ V a ) V_0=max_{a\in 1, \dots ,N}(r_a+\gamma V_a) V0=maxa∈1,…,N(ra+γVa) - 非确定动作的最大期望值(如下图) V 0 = m a x a ∈ A Σ s ∈ S P a , s 0 → s ( r s + γ V s ) V_0=max_{a\in A}\Sigma _{s\in S}P_{a, s_0\to s}(r_s+\gamma V_s) V0=maxa∈AΣs∈SPa,s0→s(rs+γVs)
- 同时体现了当前动作对后续进程的影响 V π ( s t ) = r t + γ r t + 1 + γ 2 r t + 2 + ⋯ = Σ i = 0 ∞ γ i r t + i V^{\pi}(s_t)=r_t +\gamma r_{t+1} +\gamma^2r_{t+2}+\dots =\Sigma^{\infty}_{i=0}\gamma ^i r_{t+i} Vπ(st)=rt+γrt+1+γ2rt+2+⋯=Σi=0∞γirt+i
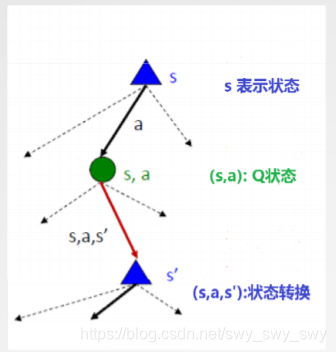
引入 Q ( s , a ) Q(s,a) Q(s,a)状态表示
- 状态 s s s及其状态值: V ( s ) = V(s)= V(s)=始于 s s s按最优策略行动的累计回报
- Q ( s , a ) Q(s,a) Q(s,a)的值: Q ( s , a ) = E U ( a ) Q(s,a)=EU(a) Q(s,a)=EU(a),在 s s s状态下执行 a a a
- 最优策略policy: π ∗ ( s ) \pi ^* (s) π∗(s) π ∗ = a r g π m a x V ∣ p i ( s ) , ( ∀ s ) \pi ^*=arg_{\pi}max~V^{|pi}(s),(\forall s) π∗=argπmax V∣pi(s),(∀s)
最优策略的计算
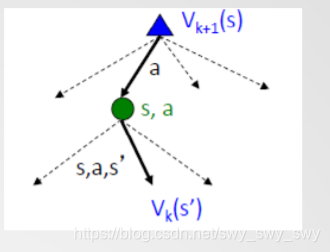
- 有如下等式 ( 0 ≤ γ ≤ 1 ) (0\le \gamma\le 1) (0≤γ≤1): V ( s ) = m a x a Q ( s , a ) V(s)=max_a ~Q(s,a) V(s)=maxa Q(s,a) Q ( s , a ) = Σ s ′ P ( s , a , s ′ ) [ r ( s , a , s ′ ) + γ V ( s ′ ) ] Q(s,a)=\Sigma_{s'}P(s,a,s')[r(s,a,s')+\gamma V(s')] Q(s,a)=Σs′P(s,a,s′)[r(s,a,s′)+γV(s′)] ( B e l l m a n e q u a t i o n ) V ( s ) = m a x a Σ s ′ P ( s , s , s ′ ) [ r ( s , a , s ′ ) + γ V ( s ′ ) ] (Bellman~equation)~V(s)=max_a\Sigma_{s'}P(s,s,s')[r(s,a,s')+\gamma V(s')] (Bellman equation) V(s)=maxaΣs′P(s,s,s′)[r(s,a,s′)+γV(s′)]
- 迭代计算: V k + 1 ( s ) ← m a x a Σ s ′ P ( s , a , s ′ ) [ r ( s , a , s ′ ) + γ V k ( s ′ ) ] V_{k+1}(s) \leftarrow max_a\Sigma_{s'}P(s,a,s')[r(s,a,s')+\gamma V_k(s')] Vk+1(s)←maxaΣs′P(s,a,s′)[r(s,a,s′)+γVk(s′)] 状态值迭代计算方法:
 状态空间: S = { s 1 , … , s n } S=\{s_1, \dots ,s_n\} S={ s1,…,sn} Bellman方程组(每个状态对应一个方程): [ V s 1 ⋮ V s n ] = [ P 11 ⋯ P 1 n ⋮ ⋱ ⋮ P n 1 ⋯ P n n ] [ V s 1 ⋮ V s n ] \left[ \begin{matrix} V_{s1}\\ \vdots \\ V_{sn} \end{matrix} \right] = \left[ \begin{matrix} P_{11} &\cdots &P_{1n}\\ \vdots &\ddots &\vdots \\ P_{n1} &\cdots &P_{nn} \end{matrix} \right] \left[ \begin{matrix} V_{s1}\\ \vdots \\ V_{sn} \end{matrix} \right] ⎣⎢⎡Vs1⋮Vsn⎦⎥⎤=⎣⎢⎡P11⋮Pn1⋯⋱⋯P1n⋮Pnn⎦⎥⎤⎣⎢⎡Vs1⋮Vsn⎦⎥⎤ 其中: P i j = { p i → j i f j ∈ s u c c e s s o r ( i ) 0 o t h e r w i s e P_{ij}=\begin{cases}p_{i\to j} &if~j\in successor(i) \\ 0 & otherwise \end{cases} Pij={ pi→j0if j∈successor(i)otherwise 向量表示: V k + 1 = P V k V_{k+1} = PV_k Vk+1=PVk 初始条件: V 0 = [ 0 ⋮ 0 ] V_0=\left[\begin{matrix}0\\ \vdots \\0 \end{matrix}\right] V0=⎣⎢⎡0⋮0⎦⎥⎤
状态空间: S = { s 1 , … , s n } S=\{s_1, \dots ,s_n\} S={ s1,…,sn} Bellman方程组(每个状态对应一个方程): [ V s 1 ⋮ V s n ] = [ P 11 ⋯ P 1 n ⋮ ⋱ ⋮ P n 1 ⋯ P n n ] [ V s 1 ⋮ V s n ] \left[ \begin{matrix} V_{s1}\\ \vdots \\ V_{sn} \end{matrix} \right] = \left[ \begin{matrix} P_{11} &\cdots &P_{1n}\\ \vdots &\ddots &\vdots \\ P_{n1} &\cdots &P_{nn} \end{matrix} \right] \left[ \begin{matrix} V_{s1}\\ \vdots \\ V_{sn} \end{matrix} \right] ⎣⎢⎡Vs1⋮Vsn⎦⎥⎤=⎣⎢⎡P11⋮Pn1⋯⋱⋯P1n⋮Pnn⎦⎥⎤⎣⎢⎡Vs1⋮Vsn⎦⎥⎤ 其中: P i j = { p i → j i f j ∈ s u c c e s s o r ( i ) 0 o t h e r w i s e P_{ij}=\begin{cases}p_{i\to j} &if~j\in successor(i) \\ 0 & otherwise \end{cases} Pij={ pi→j0if j∈successor(i)otherwise 向量表示: V k + 1 = P V k V_{k+1} = PV_k Vk+1=PVk 初始条件: V 0 = [ 0 ⋮ 0 ] V_0=\left[\begin{matrix}0\\ \vdots \\0 \end{matrix}\right] V0=⎣⎢⎡0⋮0⎦⎥⎤
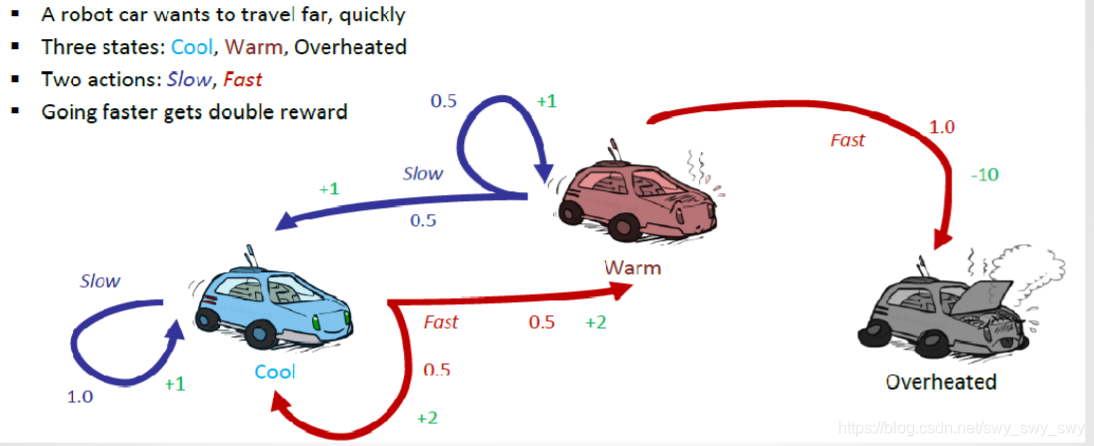
举例
问题:
 MDP搜索树:
MDP搜索树: 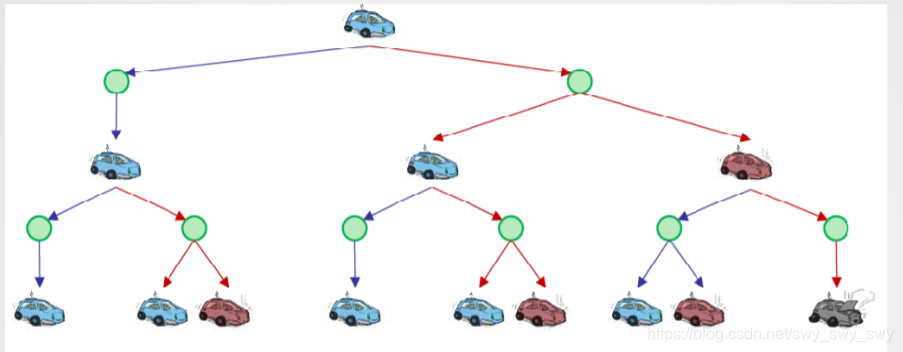 迭代计算:
迭代计算: 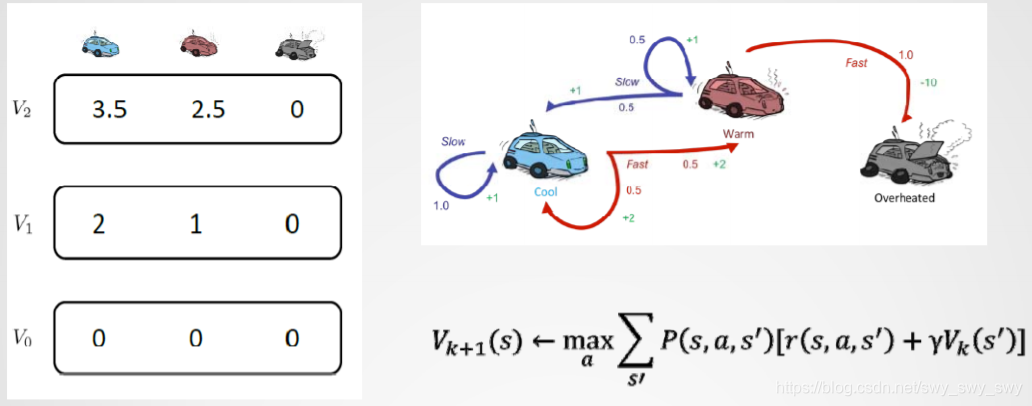
转载地址:http://fpzai.baihongyu.com/
你可能感兴趣的文章
牛客网 最大的奇约数
查看>>
python大坑:AttributeError: 'module' object has no attribute 'Workbook'
查看>>
python 协程
查看>>
在写计算器时学到的
查看>>
小Q的歌单
查看>>
牛客网 计算机网络 选择题及知识点 (1)
查看>>
0-1背包问题
查看>>
TCP-IP详解卷1:协议 学习笔记(5) RARP ICMP
查看>>
Java核心技术 卷I 基础知识 学习笔记(3)
查看>>
TCP-IP详解卷1:协议 学习笔记(6) Ping
查看>>
Java核心技术 卷I 基础知识 学习笔记(4)
查看>>
Java核心技术 卷I 基础知识 学习笔记(5)
查看>>
Java核心技术 卷I 基础知识 学习笔记(6)
查看>>
微服务架构与实践 学习笔记(1)
查看>>
Java核心技术 卷I 基础知识 学习笔记(7)
查看>>
IDEA使用之让maven项目自动依赖jar包
查看>>
Java核心技术 卷I 基础知识 学习笔记(8)
查看>>
Java核心技术 卷I 基础知识 学习笔记(9)
查看>>
IDEA Java serialVersionUID生成
查看>>
Intellij IDEA 创建资源文件夹 source folder
查看>>